Deniz Bayazit
About
Publications
TA Work

About
Hello! My name is Deniz, and I am a PhD candidate in Computer Science advised by Prof. Antoine Bosselut at the NLP lab in EPFL, IC.
My research interests broadly lie in natural language processing and artificial intelligence, and more specifically in interpretability. In particular,
- I am interested in understanding the underlying mechanisms and behavior of Large Language Models (LLMs).
- I am also interested in understanding the dynamics of LLM training and identifying factors that influence the model’s generalization and decision-making processes.
Previously, I worked with Prof. Stefanie Tellex and Prof. Ellie Pavlick at the H2R and LUNAR laboratories in the Brown CS Department.
Publications
Recent Preprints
Conference & Journal Papers
Preprints

MEDITRON-70B: Scaling Medical Pretraining for Large Language Models
Z Chen, A Hernández-Cano, A Romanou, A Bonnet, K Matoba, F Salvi, M Pagliardini, S Fan, A Köpf, A Mohtashami, A Sallinen, A Sakhaeirad, V Swamy, I Krawczuk, D Bayazit, A Marmet, S Montariol, M Hartley, M Jaggi, A Bosselut
arXiv 2023
Top ML Papers of the Week (by dair.ai)
[PDF] [code]
arXiv 2023
Top ML Papers of the Week (by dair.ai)
[PDF] [code]
Thesis Work
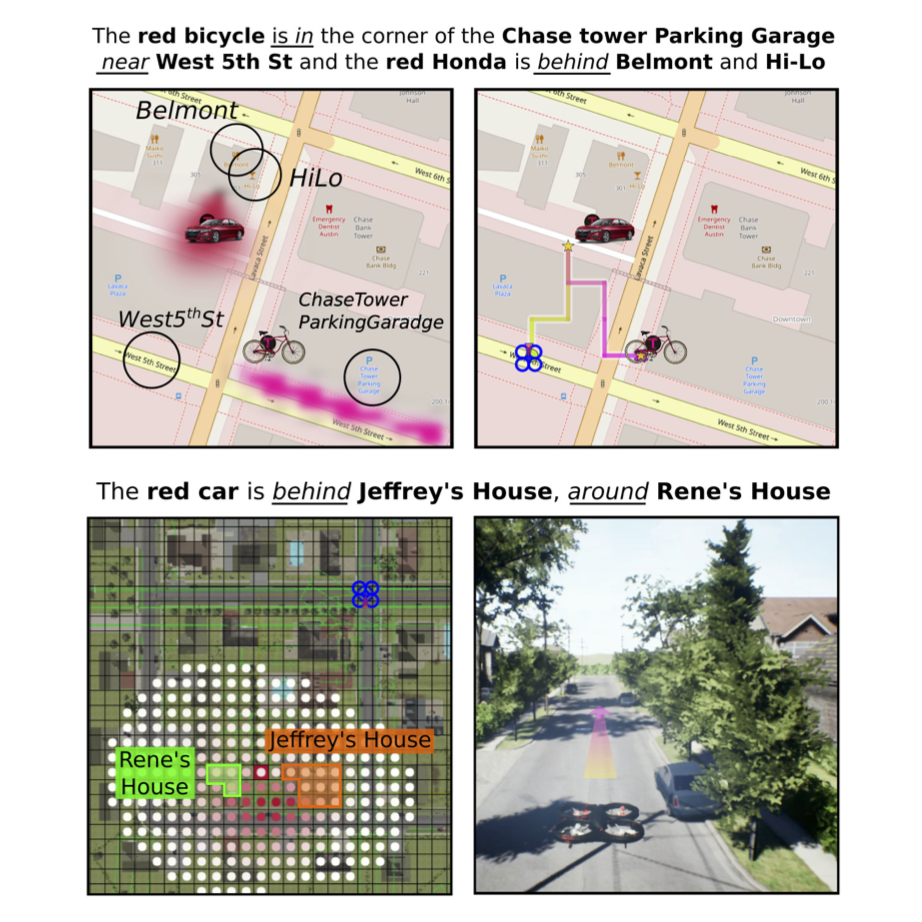
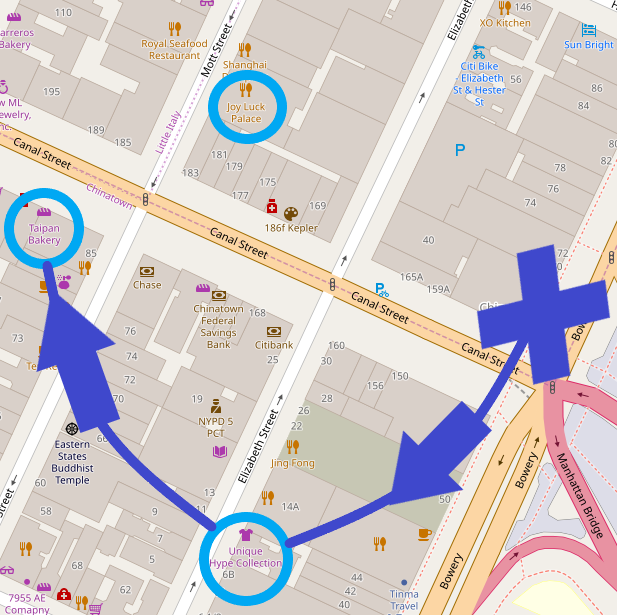
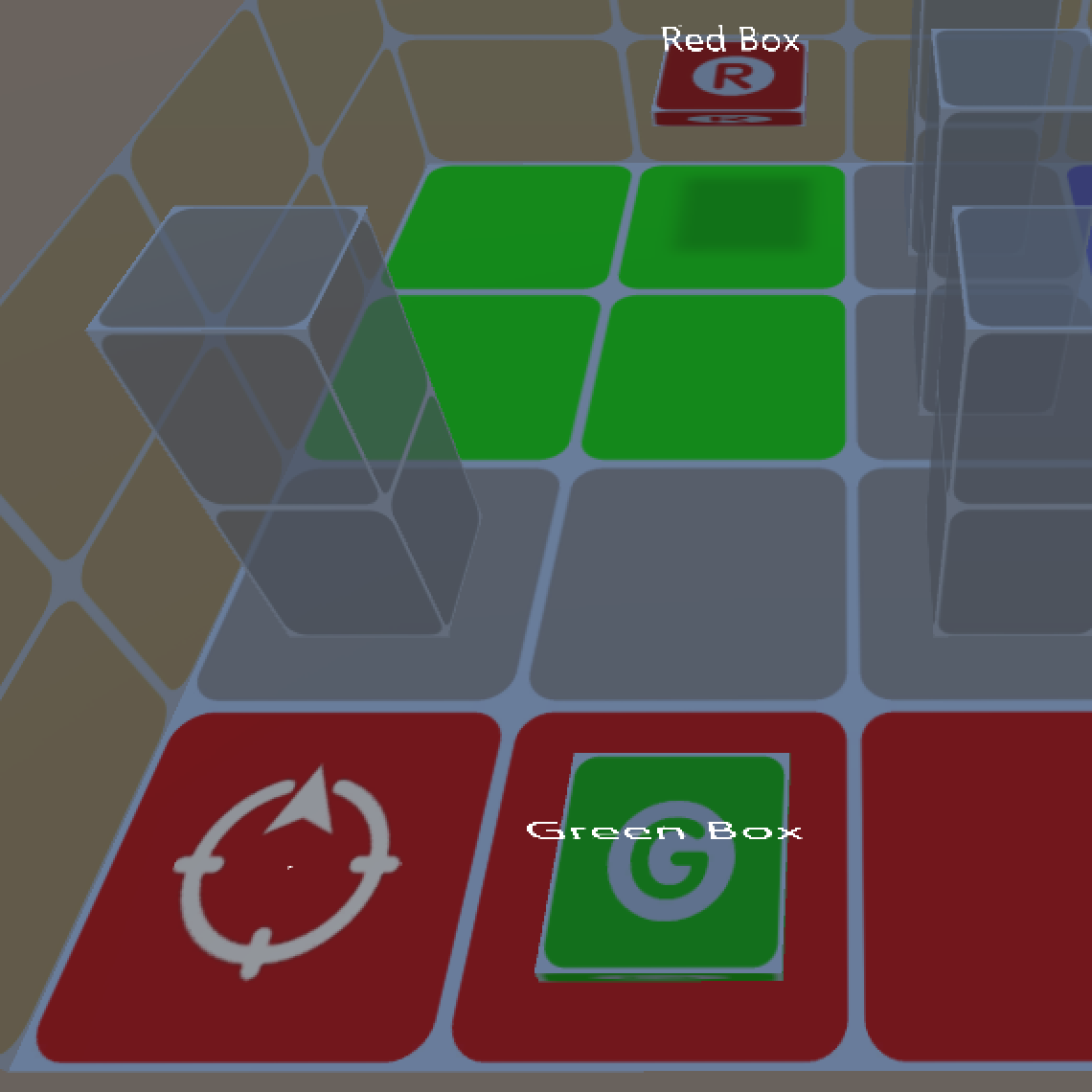
Generalizing Natural Language Instruction Following to Aerial Robots and Arbitrary Environments
D Bayazit
2020 Brown University - Undergraduate Thesis
[PDF]
2020 Brown University - Undergraduate Thesis
[PDF]
TA Work
| Semester | Course Code | Name | Professor |
|---|---|---|---|
| Spring 2023, 2024 | CS 552 | Modern Natural Language Processing | Antoine Bosselut |
| Fall 2022, 2023, 2024 | CS 431 | Introduction to Natural Language Processing | Jean-Cédric Chappelier, Martin Rajman, Antoine Bosselut |
| Spring 2021 | CSCI 2952I - CLPS 1850 | Language Processing in Humans and Machines | Ellie Pavlick, Roman Feiman |
| Fall 2019 | CSCI 1410 | Artificial Intelligence | George Konidaris |
© 2025. All rights reserved.